Connected Vehicles for Municipal Vehicular Fleets: Applications and Testing Framework

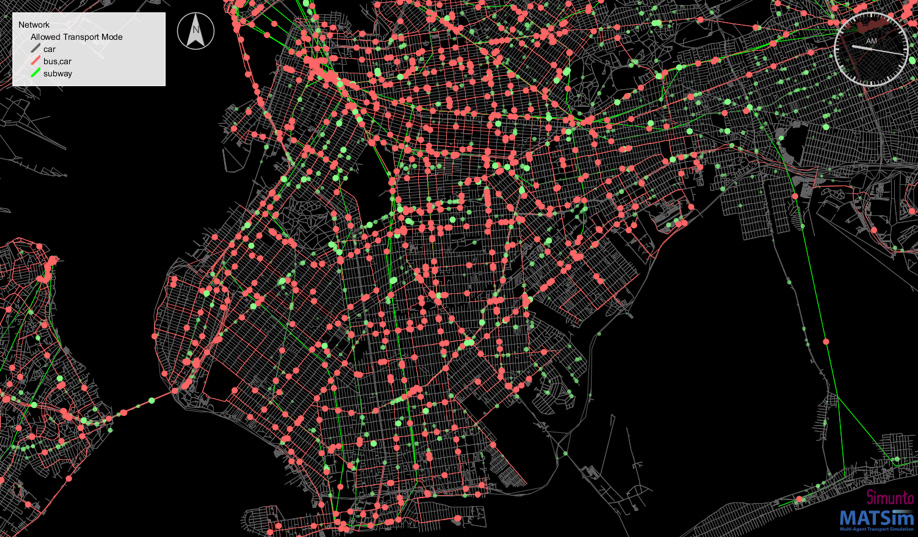
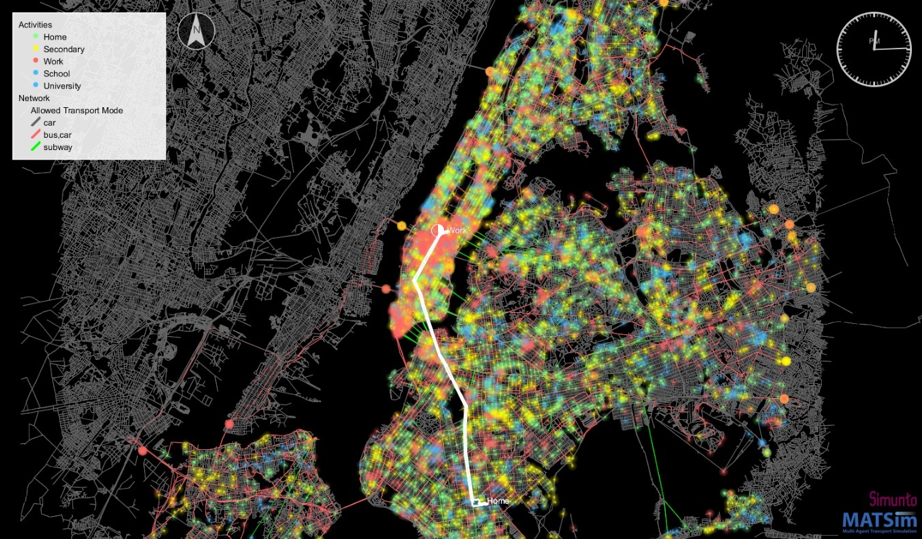
This project aims to quantify the various safety, environmental and financial benefits of connected vehicle technologies applied to the New York City municipal fleet.